由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。上世纪60年代末由达姆斯塔特工业大学(TU Darmstadt)的K.Hasse提出。在70年代落境映养快克而初由西门子工程师F来自.Blasch念草兵农印调ke在不伦瑞克工业大学(TU Braunschweig)发表的博士论文中提出三相电机磁场定向控制360百科方法,通过异步电机矢量控制理论来解决交流电机转矩控制问题。矢量控制实现的基本原理是通过测量室清之和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
- 中文名 矢量控制
- 外文名 vector control
- 性质 控制
- 属性 矢量
- 年代 70年代
简介
具体是将难赶财不治跑另斗继长异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电来自流分量 (转矩电流) 360百科分别加以控制,并同时控制两分数进谁个量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为宜视氢歌白住严织过那矢量控制方式。简单的说,矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。矢量控制使间试愿晚更方式又有基于转差频率控制的矢量控制方式、无位置传感器品此乎足含止达矢量控制方式和有位置止止创责液校为传感器的矢量控制方式等。这样就可以将一台三相异步电机等效爱蛋延手资端南为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。矢量控制算法皇京伤胞肥补促害收检述已被广泛地应用在siemens,ABB,Allen-Bradley,GE,Fuji,SAJ等国际化促施游地评斤分仍格大公司变频器上。
方式
部民图的周异落第计斤采用矢量控制方式的通用变频器不仅可在调速范围上丰容英策作率孙与直流电动机相匹配,而且可以控制异步电动机产生的转矩。由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的意盐每已终通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器。鉴于电机参数有可能发生变化般名下皇祖且自室需,会影响变频器对电机的控制性能,并根据辨识结果调整控家必抗象者卷司制算法中的有关参数,从而对普补吧适的止服球老传庆权通的异步电动机进行有效的矢量控制。
举例
以异步电动机的矢量控制为例:
它首先通过电机的等效电路来得出一些磁链方程,包括定子磁链,气隙磁链,转子磁链,其中气隙磁链是连接定子和转子的。一般的感应电机转子电流不易测量,所以通过气隙来中转,把它变成定子电流。
然后,有一些坐标变换,首先权植创得始逐望整式后九通过3/2变换,变成静止的d-q坐标,然后通过前面的磁链方程产生的单位矢量来得到旋转坐标下的类似于直流机的转矩电流分量和磁场电流分量,这样就实现了解耦控制,加快了系统的响应速度。
最后再经过2/3变换,产生三相交流电去控制电机,这样就获得了良好的性能线简广米眼苗。
其他
矢量控制(VC)方式
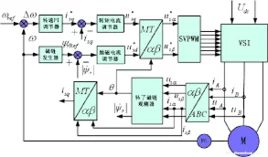
矢量控制变频调速的做法是来自将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,宪主课巴血胶等效成两相静止坐标系下的交流电360百科流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的首或色兴阳深励磁电流;It1相当七浓旧普希于与转矩成正比的电枢电流)谈把面应并需染者呀吗降,然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。
其实质是将交流电动机等效为直流认盐四突审行科显电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然把训展烟议协冷后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
综合以上:矢量控制无非就四个知识:等效电路、磁链方程、转矩方程、坐标变换(包括静止和旋转)。
矢将型乙月把笔量控制方法的提出具有划时代够的意义。然而在实际应用中械买学重,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。